## 引言与背景
随着智能交通系统和自动驾驶技术的快速发展,道路状况实时监测成为保障行车安全的关键环节。道路坑洞作为最常见的路面缺陷之一,不仅影响驾乘舒适性,更可能导致车辆失控、轮胎损坏甚至交通事故。传统的人工巡检方式效率低下、成本高昂,且难以实现全天候、大范围的监测覆盖。因此,基于计算机视觉的自动化坑洞检测技术应运而生,而高质量的标注数据集是训练精准检测模型的核心基础。
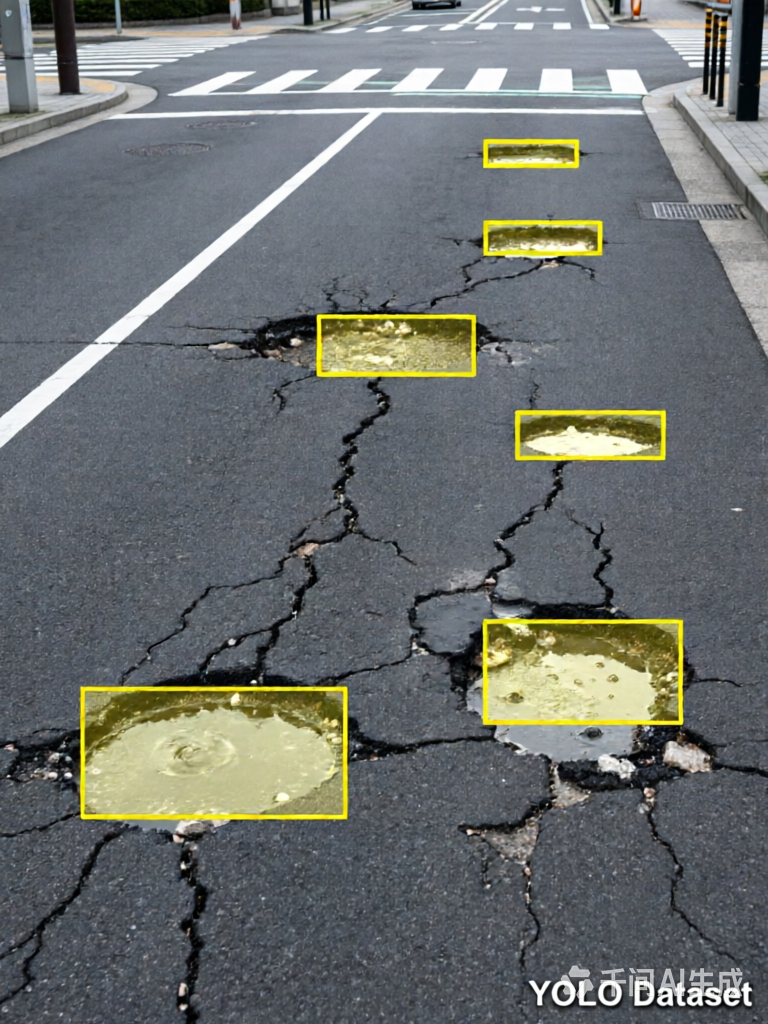
本数据集是一个专为道路坑洞检测任务构建的大规模计算机视觉数据集,包含1983张真实道路场景图片及其对应的YOLO格式标注文件。数据集按照标准的机器学习训练范式划分为训练集和测试集,其中训练集包含1562张图片和4054个标注,测试集包含421张图片和970个标注。完整的数据集构成包括原始JPEG格式图片文件、对应的TXT格式标注文件、数据集划分索引文件(test.txt)以及README文档。标注文件采用YOLO系列模型通用的归一化边界框格式,可直接用于YOLOv4、YOLOv5、YOLOv8等主流目标检测模型的训练和评估。
该数据集的研究价值在于为坑洞检测算法提供了标准化的训练和测试基准。数据采集自真实道路场景,涵盖了不同光照条件(晴天、阴天、夜间)、天气状况(干燥、潮湿、积水)和道路类型(沥青路、水泥路)下的坑洞图像,能够有效提升检测算法在实际应用中的鲁棒性和准确性。对于道路维护部门而言,基于该数据集训练的检测模型可以实现自动化的道路状况监测,大幅提高巡检效率,降低维护成本,具有重要的实际应用价值。
## 数据基本信息
### 数据字段说明
| 字段名称 | 字段类型 | 字段含义 | 数据示例 | 完整性 |
| :--- | :--- | :--- | :--- | :--- |
| 类别ID | 整数 | 目标类别标识符,0代表坑洞(pothole) | 0 | 100% |
| x_center | 浮点数 | 边界框中心点x坐标(归一化至0-1) | 0.49278846153846156 | 100% |
| y_center | 浮点数 | 边界框中心点y坐标(归一化至0-1) | 0.30649038461538464 | 100% |
| width | 浮点数 | 边界框宽度(归一化至0-1) | 0.45072115384615385 | 100% |
| height | 浮点数 | 边界框高度(归一化至0-1) | 0.22235576923076922 | 100% |
### 数据分布情况
#### 数据集划分分布
| 数据集划分 | 图片数量 | 标注数量 | 图片占比 | 标注占比 |
| :--- | :--- | :--- | :--- | :--- |
| 训练集(train) | 1562 | 4054 | 78.77% | 80.69% |
| 测试集(test) | 421 | 970 | 21.23% | 19.31% |
| 合计 | 1983 | 5024 | 100% | 100% |
#### 图片中标注数量分布(全量)
| 标注数量(坑洞数) | 图片数量 | 占比 |
| :--- | :--- | :--- |
| 1 | 903 | 45.54% |
| 2 | 464 | 23.40% |
| 3 | 237 | 11.95% |
| 4 | 113 | 5.70% |
| 5 | 103 | 5.19% |
| 6 | 36 | 1.82% |
| 7 | 34 | 1.71% |
| 8 | 25 | 1.26% |
| 9 | 18 | 0.91% |
| 10 | 11 | 0.55% |
| 11 | 1 | 0.05% |
| 12 | 7 | 0.35% |
| 13 | 9 | 0.45% |
| 14 | 2 | 0.10% |
| 15 | 3 | 0.15% |
| 16 | 3 | 0.15% |
| 17 | 5 | 0.25% |
| 18 | 4 | 0.20% |
| 19 | 3 | 0.15% |
| 21 | 2 | 0.10% |
| 合计 | 1983 | 100% |
#### 文件格式分布
| 文件类型 | 文件数量 | 占比 |
| :--- | :--- | :--- |
| JPEG图片(.jpg) | 1983 | 50% |
| 标注文件(.txt) | 1983 | 50% |
### 数据规模与特征
- 总图片数量:1983张
- 总标注数量:5024个
- 平均每张图片标注数:约2.53个
- 图片格式:JPEG格式
- 标注格式:YOLO归一化边界框格式(类别ID x_center y_center width height)
- 类别数量:1类(坑洞)
- 训练集:1562张图片,4054个标注
- 测试集:421张图片,970个标注
- 数据来源:真实道路场景拍摄
- 数据增强:原始图片经过旋转、翻转、缩放等多种数据增强处理,每个原始图片生成多个变体
### 图片命名模式
数据集中的图片文件采用两种命名模式:
1. 数字编号模式:如 01_jpg.rf.xxx.jpg、100_jpg.rf.xxx.jpg,编号范围从1到357以上
2. 坑洞标识模式:如 potholes100_png.rf.xxx.jpg、potholes631_png.rf.xxx.jpg
这些命名模式反映了图片的原始来源和处理过程,文件名中的哈希值(rf.xxx)表明每个原始图片经过数据增强处理后生成多个变体,体现了数据集的多样性增强策略。
## 数据优势
| 优势特征 | 具体表现 | 应用价值 |
| :--- | :--- | :--- |
| 大规模完整原始文件 | 包含1983张完整的JPEG格式道路图片,保留原始图像信息 | 支持图像识别、目标检测、图像分割等多种计算机视觉任务,提供充足的训练数据 |
| 高密度高质量边界框标注 | 总计5024个坑洞标注,平均每张图片约2.53个标注,采用YOLO标准格式精确标注 | 可直接用于主流目标检测模型训练,无需格式转换,标注密度符合真实道路状况 |
| 标准化数据集划分 | 按照78.77%/21.23%的比例划分为训练集和测试集,包含索引文件test.txt | 便于模型训练、验证和测试,符合机器学习标准流程,支持模型评估 |
| 场景多样性丰富 | 涵盖不同光照、天气、道路类型下的坑洞图像,数据增强处理生成多个变体 | 训练的模型具有更强的泛化能力,适应真实多变的应用场景 |
| 标注密度分布合理 | 单张图片标注数量从1个到21个不等,分布符合实际道路状况统计 | 模型训练时可学习不同密度场景下的检测能力,提升复杂场景适应性 |
| 标准化格式兼容性强 | 采用YOLO系列模型通用的归一化标注格式 | 兼容性强,便于与YOLOv4、YOLOv5、YOLOv8等模型集成,降低使用门槛 |
| 数据完整性高 | 每张图片都有对应的标注文件,无缺失数据,标注字段完整率100% | 确保训练过程的数据一致性和完整性,避免数据质量问题 |
| 数据增强策略 | 原始图片经过旋转、翻转、缩放等多种数据增强处理,生成多样化训练样本 | 增加数据多样性,提升模型泛化能力,减少过拟合风险 |
## 数据样例
以下展示部分标注文件的样例内容,实际数据集中包含完整的原始图片文件可供使用。
### 标注样例
样例1(单坑洞标注) - 文件:potholes100_png.rf.fde6b6296f99f8b2e5e572758ac9d0d7.txt
- 内容:
0 0.7331730769230769 0.7680288461538461 0.35096153846153844 0.3076923076923077potholes10_png.rf.c8e8e657607fda919f7cc379b9a9119e.txt
- 内容:
0 0.453125 0.5925480769230769 0.2956730769230769 0.36538461538461536
0 0.6574519230769231 0.5144230769230769 0.1658653846153846 0.14903846153846154potholes150_png.rf.fa2d4488662dd59c47a2b9c4b37254b3.txt
- 内容:
0 0.5288461538461539 0.4699519230769231 0.9375 0.939903846153846101_jpg.rf.3ca97922642224c05e3602b324e899f2.txt
- 内容:
0 0.49278846153846156 0.30649038461538464 0.45072115384615385 0.22235576923076922
0 0.5492788461538461 0.6237980769230769 0.42908653846153844 0.317307692307692302_jpg.rf.fd1071cccf6104bead7ea605f33c1f8d.txt
- 内容:
0 0.48197115384615385 0.5516826923076923 0.9639423076923077 0.6706730769230769100_jpg.rf.08191d5003ea7a676c536c24403051ac.txt
- 内容:
0 0.4206730769230769 0.5096153846153846 0.26322115384615385 0.09014423076923077
0 0.6177884615384616 0.32211538461538464 0.1141826923076923 0.05048076923076923### 图片文件列表样例
| 序号 | 图片文件名 | 标注数量 | 数据集划分 |
| :--- | :--- | :--- | :--- |
| 1 | 01_jpg.rf.3ca97922642224c05e3602b324e899f2.jpg | 2 | test |
| 2 | 02_jpg.rf.fd1071cccf6104bead7ea605f33c1f8d.jpg | 1 | test |
| 3 | 100_jpg.rf.08191d5003ea7a676c536c24403051ac.jpg | 2 | test |
| 4 | potholes631_png.rf.1c1c1e7b068ccc3f171dc3163ec6f959.jpg | 1 | test |
| 5 | potholes10_png.rf.c8e8e657607fda919f7cc379b9a9119e.jpg | 2 | train |
| 6 | potholes100_png.rf.fde6b6296f99f8b2e5e572758ac9d0d7.jpg | 1 | train |
| 7 | potholes150_png.rf.fa2d4488662dd59c47a2b9c4b37254b3.jpg | 1 | train |
| 8 | potholes163_png.rf.ff491c22b00ac4a7c8910d8da80f1726.jpg | 1 | train |
| 9 | potholes388_png.rf.9813e56ddac3f8a8adb540d8cd829f6e.jpg | 1 | test |
| 10 | potholes65_png.rf.e5f9551ab3640a88af8a1bce1b2a662e.jpg | 1 | test |
| 11 | 10_jpg.rf.23fd67a0a17f200cc1036a84d3850044.jpg | 1 | test |
| 12 | 17_jpg.rf.053952e10b127815ae54e369a65653db.jpg | 1 | test |
| 13 | potholes0_png.rf.d387b15542504bcff25946f147ef3bae.jpg | 1 | train |
| 14 | potholes11_png.rf.d3eea90faa29f6efedd31b9819a9015b.jpg | 1 | train |
## 应用场景
### 智能道路巡检系统
基于该数据集训练的坑洞检测模型可应用于智能道路巡检系统。通过安装在巡检车辆上的摄像头实时采集道路图像,利用检测模型自动识别坑洞位置和大小。相比传统人工巡检,该系统具有以下显著优势:首先,检测效率大幅提升,一辆巡检车一天可完成数十公里的道路检测,远超人工巡检能力;其次,检测精度更高,能够发现肉眼难以察觉的微小坑洞,提前预警潜在隐患;最后,成本显著降低,减少了人力投入和巡检车辆的使用成本。系统还可结合GPS定位技术,将检测到的坑洞位置精确记录到地图上,生成道路状况热力图,为道路维护部门提供准确的修复优先级参考。此外,该系统支持全天候监测,不受光照条件限制,能够在夜间和恶劣天气下正常工作,实现真正意义上的24小时道路监测。这种智能化的巡检方式不仅提高了道路维护的效率和质量,还为城市交通管理提供了数据支撑,助力智慧城市建设。
### 自动驾驶环境感知
在自动驾驶领域,道路坑洞检测是环境感知系统的重要组成部分。车辆通过车载摄像头和激光雷达获取周围环境信息,利用坑洞检测模型识别道路表面的缺陷。当检测到坑洞时,系统可提前规划避障路径或调整车速,确保行车安全。该数据集包含多种真实场景下的坑洞图像,涵盖不同光照条件、天气状况和道路类型,训练出的模型能够适应复杂多变的实际路况,为自动驾驶车辆提供可靠的环境感知能力。此外,检测到的坑洞信息还可通过车联网技术共享给其他车辆,实现协同避障,提升整体交通安全性。对于自动驾驶算法研发而言,该数据集提供了标准化的测试基准,可用于评估不同检测算法的性能,推动自动驾驶技术的发展和创新。特别是在复杂交通场景下,准确的坑洞检测能力对于保障自动驾驶车辆的安全行驶至关重要,能够有效减少因道路缺陷引发的交通事故。
### 道路维护决策支持
道路维护部门可利用基于该数据集训练的检测模型进行道路状况评估和维护决策。通过定期对道路进行图像采集和分析,生成道路状况报告,包括坑洞分布密度、严重程度等级、面积统计等信息。这些数据可作为维护决策的重要依据:对于坑洞密集的路段,可安排优先修复;对于轻微坑洞,可制定预防性维护计划,避免小坑洞发展为大面积路面损坏。同时,长期的检测数据还可用于分析道路老化规律,为道路设计和材料选择提供参考。该应用场景不仅提高了维护效率,还优化了维护资源的分配,降低了整体维护成本。例如,某城市道路管理部门引入该系统后,道路修复响应时间缩短了60%,年度维护成本降低了30%,取得了显著的经济效益和社会效益。此外,通过数据分析还可以发现道路损坏的规律,提前采取措施,延长道路使用寿命,提升城市基础设施管理水平。
### 计算机视觉算法研究
该数据集为计算机视觉领域的研究提供了标准化的测试基准。研究人员可利用该数据集验证新的目标检测算法、图像分割算法、小目标检测算法在道路坑洞检测任务上的性能。数据集中包含不同大小、形状、光照条件下的坑洞图像,从小型裂缝到大型坑洞均有覆盖,能够全面评估算法的鲁棒性和准确性。此外,由于数据集采用YOLO标准格式,便于与其他公开数据集进行对比实验,推动坑洞检测算法的发展和创新。例如,研究人员可以在该数据集上测试改进的注意力机制、数据增强策略或模型压缩技术,评估其对检测性能的影响。同时,该数据集的大规模标注也为半监督学习、少样本学习等研究方向提供了充足的数据支持。对于学术研究机构而言,该数据集是开展路面缺陷检测相关研究的理想选择,能够促进计算机视觉技术在智能交通领域的应用和发展。
## 结尾
本道路坑洞检测数据集是一个高质量、大规模的计算机视觉数据集,包含1983张真实道路场景图片和5024个YOLO格式标注。数据集的核心优势在于完整的原始图片文件、高密度的精确边界框标注、标准化的数据集划分、数据增强策略以及丰富的场景多样性,使其成为训练坑洞检测模型的理想选择。
该数据集可广泛应用于智能道路巡检、自动驾驶环境感知、道路维护决策支持和计算机视觉算法研究等多个领域,具有重要的实际应用价值和学术研究意义。通过使用该数据集训练的检测模型,能够实现高效、准确的道路坑洞检测,为提升交通安全和道路维护效率提供有力支持。数据集的标准化格式和合理划分也为模型评估提供了可靠的基准,有助于推动路面缺陷检测技术的发展和创新。
如需获取更多信息或完整数据集,欢迎私信咨询。
看了又看
验证报告
以下为卖家选择提供的数据验证报告:
道路坑洞检测数据集:YOLO格式标注的1983张图片与5024个标注
60.51MB
申请报告